Willkommen am Institut für Technische Informatik
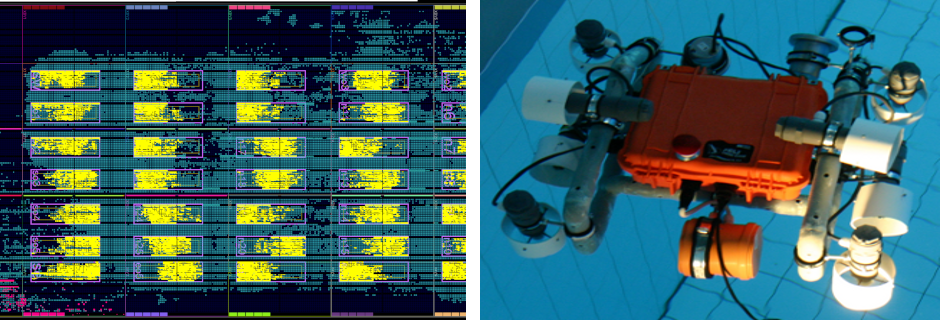
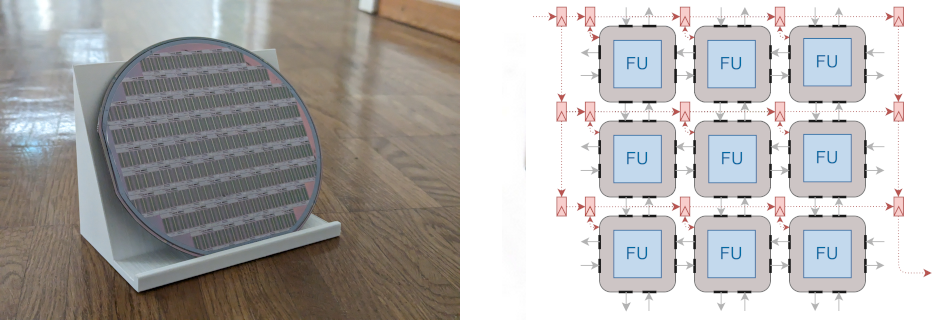
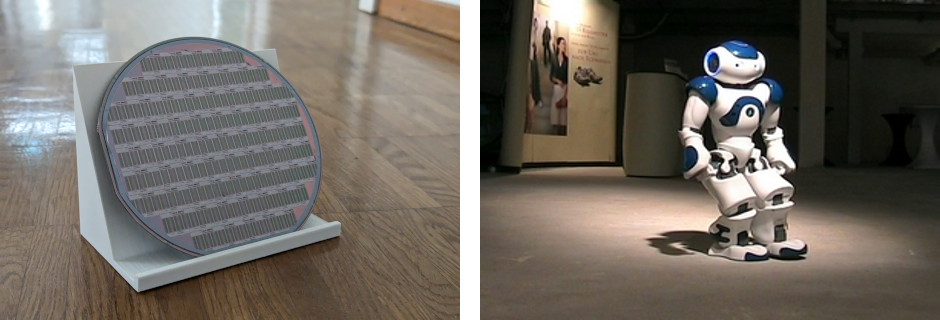
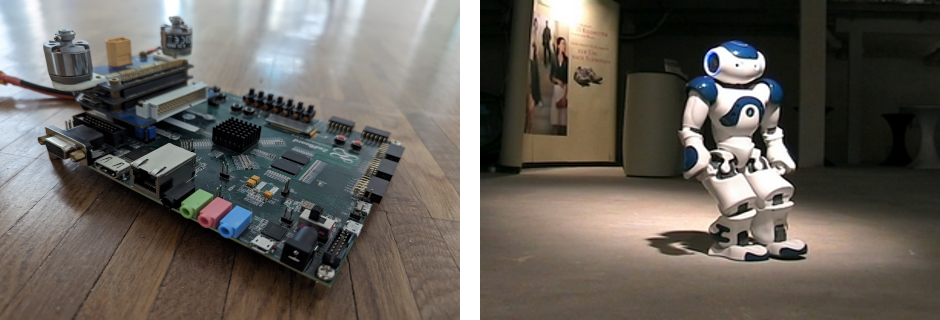
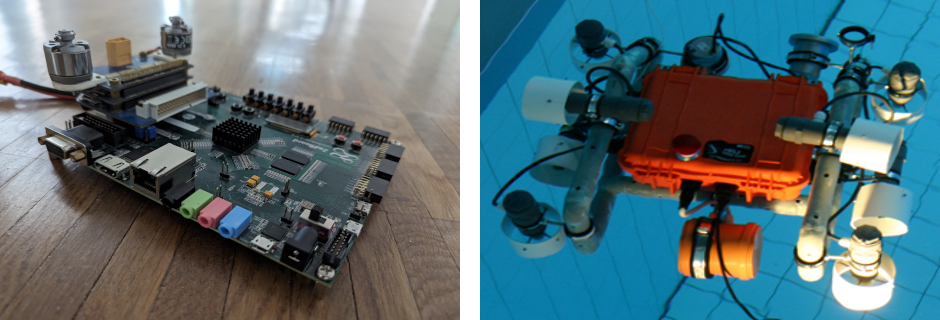
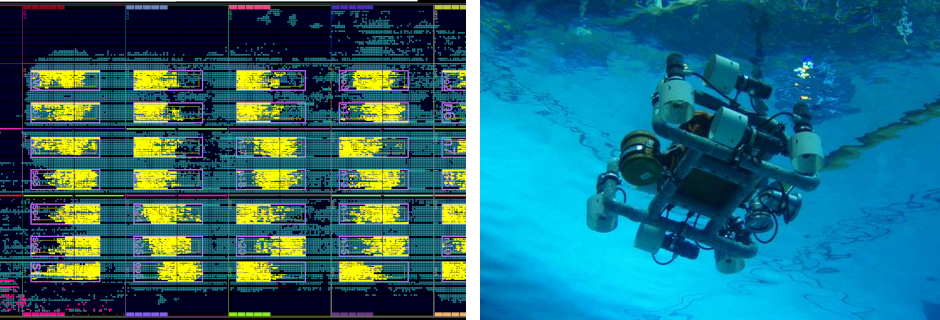
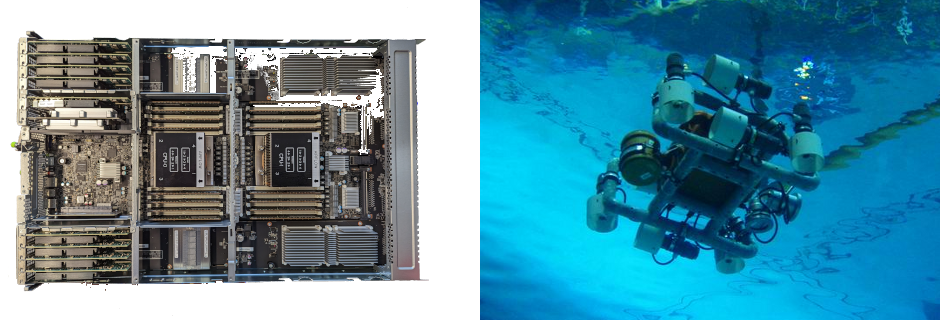
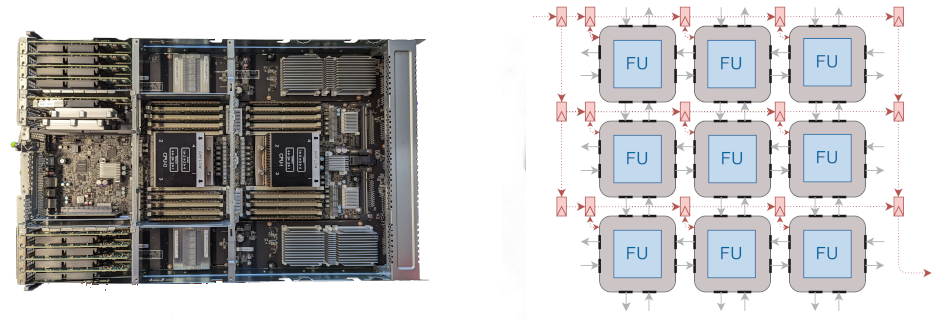
Das Institut für Technische Informatik (ITI) der Universität zu Lübeck (Direktor: Prof. Dr.-Ing. Mladen Berekovic) beschäftigt sich mit der Architektur von Hardware/Software-Systemen sowie deren prototypischer Implementierung und Evaluation. Forschungsschwerpunkte sind dabei mobile autonome Roboter, Cyber-Physical Systeme sowie integrierte Schaltungen in Form von SoCs (System-on-Chip).
Aktuelle Projekte befassen sich sowohl mit Grundlagenforschung als auch mit Anwendungen aus der Medizin, der Umwelttechnik und der Industrie.
Ausgeführt werden diese Arbeiten von einem internationalen und interdisziplinären Team aus Informatikern, Elektrotechnikern und Maschinenbauern. In der Lehre ist das ITI sowohl für die Grundausbildung in Technischer Informatik in den Studiengängen Informatik, Medizininformatik und Medizinischen Ingenieurwissenschaften als auch für das Anwendungsfach Robotik und Automation im Informatikstudium zuständig. Zudem werden vertiefende Vorlesungen, Seminare und Praktika zu den aktuellen Forschungsthemen angeboten.
Fr, 11.07.2025
ITI team participated in Berlin 6G conference and showcased a live demo for Rilkosan project, including end-to-end IDS for secure industrial environment.
For more information on Rilkosan project, please visit
Fr, 30.05.2025
Studierendenteam erfolgreich bei Technologie-Wettbewerb
Erfolg für die praxisnahe Ausbildung in Robotik und autonomem Fahren: Lübecker Doktoranden...
Fr, 24.05.2024
Hardware Summit for Computing on Encrypted Data in Leuven/Belgien
Das ITI-Team hat am Hardware Summit for Computing on Encrypted Data in Leuven/Belgien vom 23. bis...